- Published on
🏊♀️ What Are Pooling Layers and Why We Need Them?
- Authors

- Name
- Van-Loc Nguyen
- @vanloc1808
🏊♀️ Pooling Layers
🚀 Introduction
Pooling layers are a crucial component of Convolutional Neural Networks (CNNs), which are widely used in image processing and computer vision tasks. They help reduce the spatial dimensions of feature maps, making the network more efficient and less prone to overfitting.
🎯 Key Purpose
Pooling layers are the "compression wizards" of CNNs - they shrink data while keeping the important stuff!
In this article, we will explore the purpose of pooling layers, their types, and their significance in CNN architectures.
🔧 Common Pooling Techniques
Pooling layers are used to down-sample feature maps, reducing their spatial dimensions while retaining important information. The most common pooling techniques include:
🔥 Max Pooling
Takes the MAXIMUM value from each window
📊 Average Pooling
Calculates the AVERAGE value from each window
- 🔥 Max Pooling: This technique selects the maximum value from a defined window (e.g., 2x2) and discards the rest. It helps retain the most prominent features while reducing the size of the feature map.
- 📊 Average Pooling: This technique calculates the average value of the defined window and uses it as the representative value for that region. It is less aggressive than max pooling and can help retain more information about the feature map.
| Max Pooling and Average Pooling |
|---|
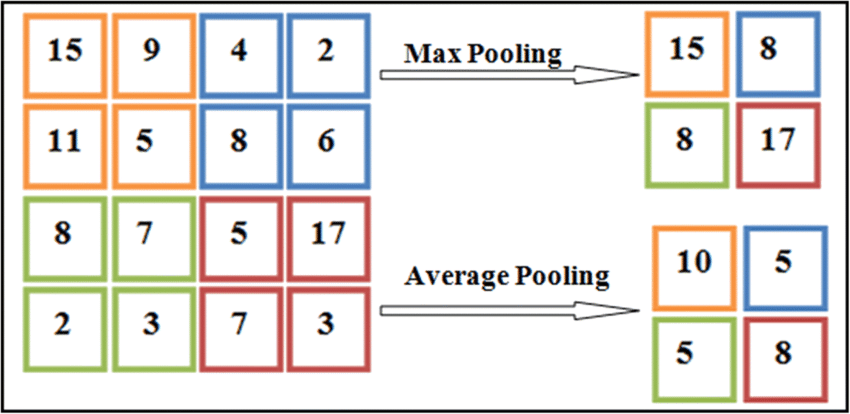 |
| Figure 1: Example of Max Pooling and Average Pooling. Image source: ResearchGate |
⚔️ Comparison of Pooling Techniques
💡 Quick Summary: Max pooling is like choosing the "strongest" feature, while average pooling is like taking everyone's opinion!
| Aspect | 🔥 Max Pooling | 📊 Average Pooling |
|---|---|---|
| ⚡ Computation | Faster because it only selects the maximum value | Slower due to averaging |
| 🎯 Feature Retention | Keeps the strongest feature (most important one) | Blurs features by averaging |
| 🕳️ Sparsity | Creates sparse activations (only strong features survive) | Creates denser activations (all values survive somehow) |
| 🔇 Noise Sensitivity | Less sensitive to noise (only the strongest feature is retained) | More sensitive to noise (all values contribute to the average) |
| 🏃♀️ Training Efficiency | Often leads to faster convergence during training | May require more epochs to converge due to noise sensitivity |
🏆 Winner: Max Pooling
In practice, max pooling is more commonly used in CNN architectures due to its efficiency and effectiveness!
In practice, max pooling is more commonly used in CNN architectures. Max pooling is often more efficient because it preserves the strongest activation (most important feature) with the least computation and memory, while also adding robustness to small input variations.
From ChatGPT:
- Max pooling says: "What’s the most important thing here? Keep it."
- Average pooling says: "Let’s mix everything together and hope the average is meaningful."
Networks using Max Pooling
- 🏆 AlexNet (2012): The first deep CNN that won the ImageNet competition in 2012. It used max pooling layers to reduce the spatial dimensions of feature maps. Read more about AlexNet at its paper ImageNet Classification with Deep Convolutional Neural Networks.
- 🔥 VGGNet (2014): A deep CNN architecture that used max pooling layers to reduce the spatial dimensions of feature maps while maintaining a deep network structure. Read more about VGGNet at its paper Very Deep Convolutional Networks for Large-Scale Image Recognition.
- 🌟 GoogLeNet (2014): A deep CNN architecture that used a combination of max pooling and average pooling layers to reduce the spatial dimensions of feature maps. Read more about GoogLeNet at its paper Going Deeper with Convolutions.
- 🚀 ResNet (2015): A deep CNN architecture that used max pooling layers to reduce the spatial dimensions of feature maps while maintaining a deep network structure. Read more about ResNet at its paper Deep Residual Learning for Image Recognition.
📊 Networks using Average Pooling
- 🌐 DenseNet (2017): A deep CNN architecture that used average pooling layers to reduce the spatial dimensions of feature maps while maintaining a deep network structure. Read more about DenseNet at its paper Densely Connected Convolutional Networks.
- ⚡ EfficientNet (2019): A deep CNN architecture that used average pooling layers to reduce the spatial dimensions of feature maps while maintaining a deep network structure. Read more about EfficientNet at its paper EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks.
🎯 Why Do We Need Pooling Layers?
Pooling layers are essential in CNNs for several reasons:
📉 Dimensionality Reduction
Shrinks feature maps → Faster training & inference
🔍 Feature Extraction
Keeps the most important features
🔄 Translation Invariance
Objects can move slightly, network still works
🛡️ Overfitting Prevention
Forces network to learn robust features
🔇 Noise Reduction
Filters out less important information
- 📉 Dimensionality Reduction: Pooling layers reduce the spatial dimensions of feature maps, which helps decrease the number of parameters and computations in the network. This leads to faster training and inference times.
- 🔍 Feature Extraction: Pooling layers help extract the most important features from the input data, making it easier for the network to learn and generalize.
- 🔄 Translation Invariance: Pooling layers provide a degree of translation invariance, meaning that small translations in the input data will not significantly affect the output of the network. This is particularly important in image processing tasks, where objects may appear at different locations in the input image.
- 🛡️ Overfitting Prevention: By reducing the spatial dimensions of feature maps, pooling layers help prevent overfitting by forcing the network to learn more robust features that are less sensitive to small variations in the input data.
- 🔇 Noise Reduction: Pooling layers help reduce noise in the feature maps by discarding less important information, allowing the network to focus on the most relevant features.
🤔 Why Don't We Just Increase the Stride?
Increasing the stride of the convolutional layers can also reduce the spatial dimensions of feature maps. However, this approach has some drawbacks:
- Loss of Information: Increasing the stride may lead to a loss of important information in the feature maps, as it skips over some of the input data.
- Noise Sensitivity: Larger strides can make the network more sensitive to noise, as it may not capture all relevant features in the input data. In other words, increasing the stride does not provide local invariance, while pooling does.
- Flexibility: This approach is tied to the convolution kernel, making it less flexible than pooling layers, which can be applied independently of the convolutional layers.
Conclusion
Pooling layers are a vital component of Convolutional Neural Networks, providing dimensionality reduction, feature extraction, translation invariance, overfitting prevention, and noise reduction. While max pooling is the most commonly used technique, average pooling can also be effective in certain architectures. Understanding the purpose and significance of pooling layers is essential for designing efficient and robust CNNs for various tasks in image processing and computer vision. Pooling layers are not strictly necessary for CNNs, but they are highly beneficial in practice. They help improve the performance and efficiency of CNNs, making them a standard component in most architectures.
References
- Why is max pooling necessary in convolutional neural networks?
- Pooling Layer
- CS231n: Deep Learning for Computer Vision Stanford
🙏 Acknowledgments
Special thanks to ChatGPT for enhancing this post with suggestions, formatting, and emojis.